







כלל יד שמאל, כלל יד ימין, כלל בורג ימין.כלל יד שמאל, זה הבסיס לניתוח כוח סיבוב המנוע.במילים פשוטות, זה המוליך נושא הזרם בשדה המגנטי, שיושפע מהכוח.
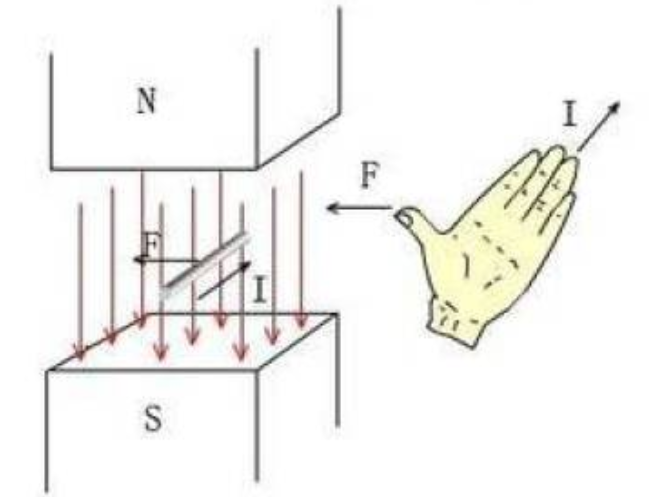
תנו לקו השדה המגנטי לעבור דרך החלק הקדמי של כף היד, כיוון האצבעות הוא כיוון הזרם, וכיוון האגודל הוא כיוון הכוח המגנטי.המתיחה של הכוח חותכת את קווי השדה המגנטי כדי ליצור כוח אלקטרו-מוטורי.
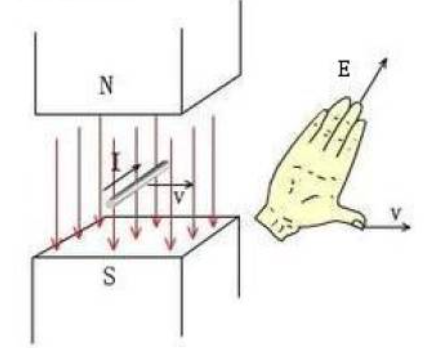
תנו לקו השדה המגנטי לעבור דרך כף היד, כיוון האגודל הוא כיוון התנועה, וכיוון האצבע הוא כיוון הכוח האלקטרו-מוטיבי שנוצר.למה לדבר על כוח אלקטרו-מוטיבציה מושרה?אני לא יודע אם יש לך ניסיון דומה.כאשר משלבים את החוטים התלת פאזיים של המנוע ומסובבים את המנוע ביד, תגלו שההתנגדות גדולה מאוד.הסיבה לכך היא שהאינדוקציה מתרחשת במהלך סיבוב המנוע.הכוח האלקטרו-מוטיבי יוצר זרם, והזרם העובר דרך המוליך בשדה המגנטי יפיק כוח מנוגד לכיוון הסיבוב, וכולם ירגישו שיש התנגדות רבה לסיבוב.
החוטים התלת פאזיים מופרדים וניתן לסובב את המנוע בקלות
הקווים התלת פאזיים משולבים, וההתנגדות של המנוע גדולה מאוד.לפי כלל הבורג ביד ימין, החזק את הסולנואיד המופעל ביד ימין, כך שארבע האצבעות כפופות באותו כיוון של הזרם, ואז הקצה שמצביע על ידי האגודל הוא קוטב ה-N של הסולנואיד המופעל.
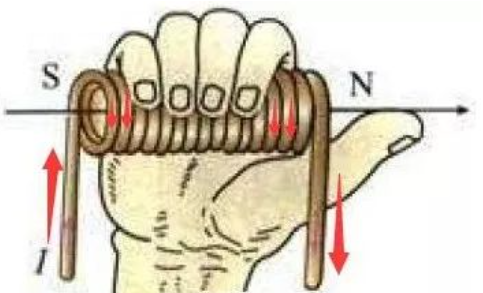
כלל זה הוא הבסיס לשיפוט הקוטביות של הסליל המופעל, וכיוון החץ האדום הוא הכיוון הנוכחי.לאחר קריאת שלושת הכללים, בואו נסתכל על העקרונות הבסיסיים של סיבוב מוטורי.החלק הראשון: מודל מנוע DC אנו מוצאים מודל של מנוע DC שנלמד בפיזיקה בתיכון, ומבצעים ניתוח פשוט באמצעות שיטת ניתוח המעגל המגנטי.
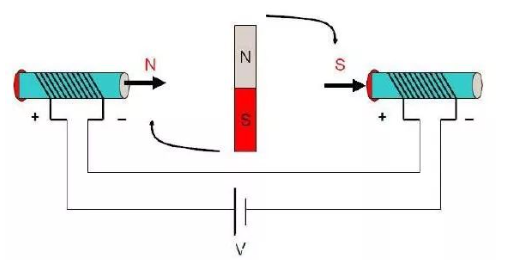
מצב 1 כאשר מופעל זרם על הסלילים בשני הקצוות, על פי כלל הבורג הימני, תיווצר עוצמת אינדוקציה מגנטית מופעלת B (כפי שמוצג על ידי החץ העבה), והרוטור באמצע ינסה ליצור כיוון קו האינדוקציה המגנטי הפנימי שלו ככל האפשר.הכיוון של קו השדה המגנטי החיצוני הוא עקבי ליצירת לולאת קו שדה מגנטי סגור הקצר ביותר, כך שהרוטור הפנימי יסתובב עם כיוון השעון.כאשר כיוון השדה המגנטי של הרוטור מאונך לכיוון השדה המגנטי החיצוני, מומנט הסיבוב של הרוטור הוא הגדול ביותר.שימו לב שה"רגע" הוא הגדול ביותר, לא ה"כוח".נכון שכאשר השדה המגנטי של הרוטור נמצא באותו כיוון של השדה המגנטי החיצוני, הכוח המגנטי על הרוטור הוא הגדול ביותר, אבל בזמן זה הרוטור במצב אופקי וזרוע הכוח היא 0, ו- כמובן שהוא לא יסתובב.להוסיף, הרגע הוא מכפלת הכוח וזרוע הכוח.אם אחד מהם הוא אפס, המוצר הוא אפס.כאשר הרוטור יפנה למצב אופקי, למרות שהוא כבר לא מושפע מהמומנט הסיבובי, הוא ימשיך להסתובב בכיוון השעון בגלל האינרציה.בשלב זה, אם הכיוון הנוכחי של שני הסולנואידים משתנה, כפי שמוצג באיור למטה, הרוטור ימשיך להסתובב.סובב קדימה בכיוון השעון,
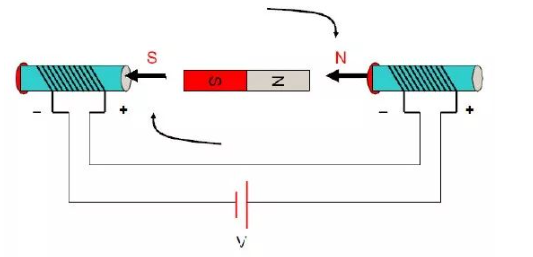
במצב 2, כיוון הזרם של שני הסולנואידים משתנה כל הזמן, והרוטור הפנימי ימשיך להסתובב.פעולה זו של שינוי כיוון הזרם נקראת התמורה.הערה צדדית: מתי להתקומם קשור רק למיקום הרוטור ולא קשור ישירות לכמות אחרת.חלק 2: מנוע רוטור פנימי תלת-פאזי דו-קוטבי באופן כללי, לפיתולים התלת-פאזיים של הסטטור יש מצב חיבור כוכב ומצב חיבור דלתא, ו"מצב שני-שניים של חיבור כוכב תלת-פאזי" הוא הנפוץ ביותר משמש, המשמש כאן.מודל זה משמש לניתוח פשוט.
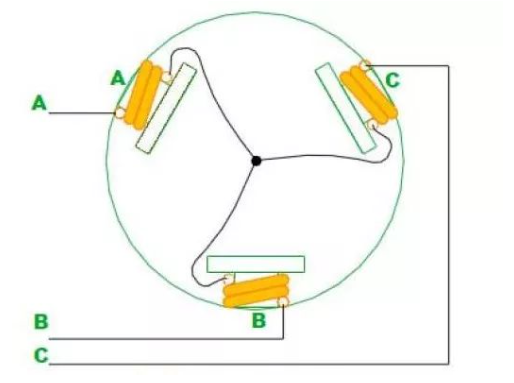
האיור שלמעלה מראה כיצד פיתולי הסטטור מחוברים (הרוטור אינו מוצג כמגנט דו-קוטבי היפותטי), ושלושת הפיתולים מחוברים יחד בצורת "Y" דרך נקודת החיבור המרכזית.המנוע כולו מוביל לשלושה חוטים A, B, C. כאשר הם מופעלים שניים על שניים, ישנם 6 מקרים, כלומר AB, AC, BC, BA, CA, CB.שימו לב שזה בסדר.
עכשיו אני מסתכל על השלב הראשון: שלב AB מומרץ
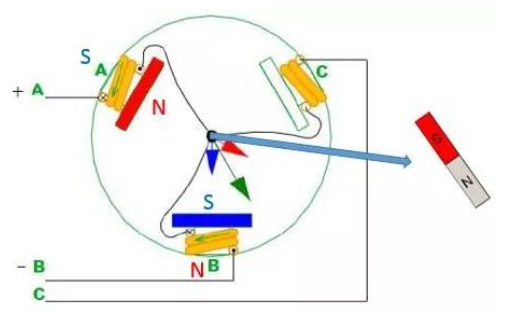
כאשר שלב AB מופעל, כיוון קו השדה המגנטי שנוצר על ידי סליל קוטב A מוצג על ידי החץ האדום, וכיוון קו השדה המגנטי שנוצר על ידי קוטב B מוצג על ידי החץ הכחול, ולאחר מכן הכיוון של הכוח המתקבל מוצג על ידי החץ הירוק, ואז בהנחה שיש מגנט דו-קוטבי, כיוון הקוטב ה-N יעלה בקנה אחד עם הכיוון שמוצג על ידי החץ הירוק לפי "הרוטור שבאמצע ינסה לשמור על כיוון קווי השדה המגנטי הפנימי שלו תואם את הכיוון של קווי השדה המגנטי החיצוני".לגבי ג' אין לו קשר איתו בינתיים.
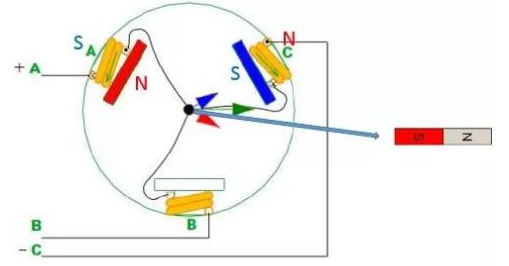
שלב 2: AC Phase אנרגטי
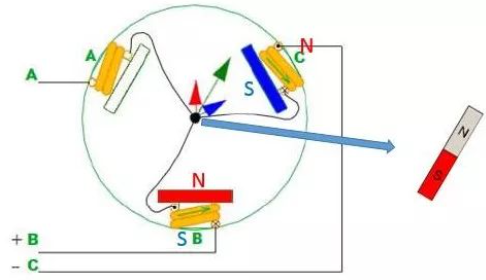
השלב השלישי: חשמול שלב לפני הספירה
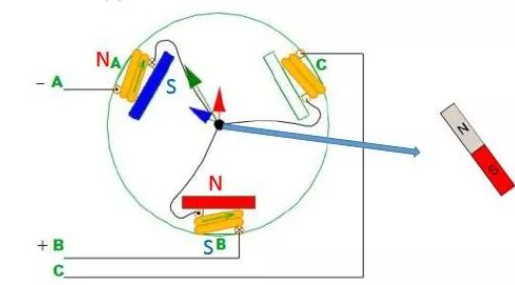
השלב השלישי: שלב BA מומרץ
להלן דיאגרמת המצב של מגנט הביניים (רוטור): כל רוטור תהליך מסתובב 60 מעלות

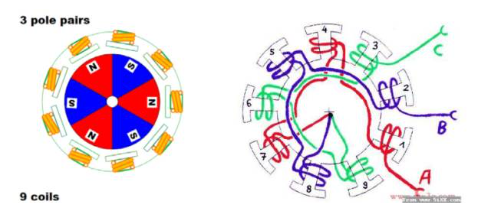
הרוטציה המלאה מסתיימת בשישה תהליכים, מתוכם נעשים שישה קומוטציות.החלק השלישי: מנוע רוטור פנימי תלת פאזי רב-פתיל רב קוטבי בואו נסתכל על נקודה מסובכת יותר.איור (א) הוא מנוע תלת פאזי בעל שישה קוטבים (תלת פאזי, תשעה פיתולים, שישה קוטבים).מנוע רוטור פנימי בקוטב הנגדי, חיבור המתפתל שלו מוצג באיור (ב).ניתן לראות מאיור (ב) שגם הפיתולים התלת פאזיים מחוברים יחד בנקודת הביניים, שהיא גם חיבור כוכב.באופן כללי, מספר הפיתולים של המנוע אינו עולה בקנה אחד עם מספר קטבי המגנט הקבועים (לדוגמה, נעשה שימוש ב-9 פיתולים ו-6 קטבים במקום 6 פיתולים ו-6 קטבים), כדי למנוע את השיניים של הסטטור וה- מגנטים של הרוטור ממשיכה ויישור.
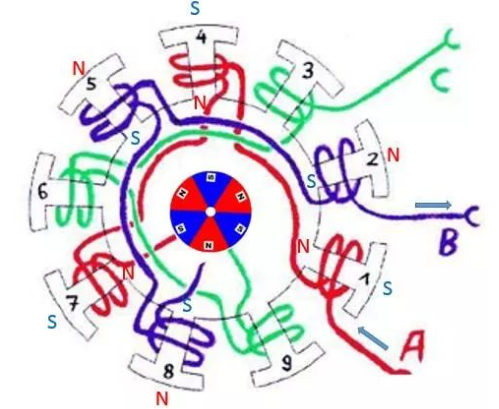
עקרון התנועה שלו הוא: לקוטב N של הרוטור ולקוטב S של הפיתול המופעל יש נטייה להתיישר, ולקוטב S של הרוטור ולקוטב N של הפיתול המופעל יש נטייה להתיישר.כלומר, S ו-N מושכים זה את זה.שימו לב שהיא שונה משיטת הניתוח הקודמת.ובכן, בוא נעזור לך לנתח את זה שוב.השלב הראשון: שלב AB מחושמל
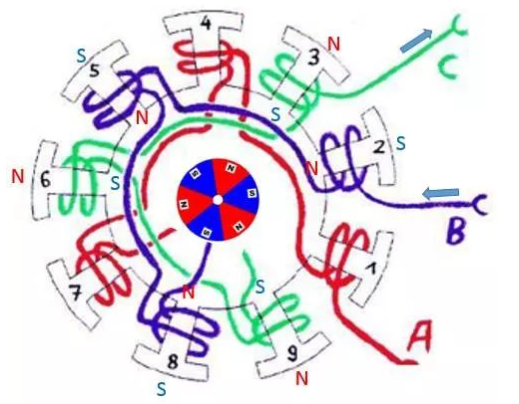
שלב 2: AC Phase אנרגטי

השלב השלישי: חשמול שלב לפני הספירה
זמן פרסום: 21 באוקטובר 2022